

Belt conveyor drive device configuration မြင့်မားနေပါက အရင်းအမြစ်များ ဖြုန်းတီးခြင်းဖြစ်သည်ဟု ယေဘုယျအားဖြင့် ယုံကြည်ကြသည်။ သို့ရာတွင် ကြီးမားသောစက်ပစ္စည်းများအတွက်၊ အလွန်နိမ့်ပါက၊ ၎င်းသည် ခါးပတ်ကိုစတင်သောအခါတွင် ရွေ့လျားတင်းမာမှုကို တိုးလာစေပြီး ခါးပတ်ကိုပင် ပဲ့တင်ထပ်စေမည်ဖြစ်သည်။ မောင်းနှင်သည့်ကိရိယာကို ကျိုးကြောင်းဆီလျော်စွာ ရွေးချယ်နည်းသည် ခါးပတ် conveyor ၏ ဒီဇိုင်းတွင် သော့ချက်ဖြစ်သည်။ ဒီဇိုင်းသည် ကျိုးကြောင်းဆီလျော်မှုရှိမရှိ၊ လည်ပတ်မှုပုံမှန်ဖြစ်သည်၊ နှင့် ပြုပြင်ထိန်းသိမ်းမှုကုန်ကျစရိတ်နှင့် ပြုပြင်ထိန်းသိမ်းမှုပမာဏမှာ နည်းပါးသည်မှာလည်း အဓိကပြဿနာဖြစ်သည်။ ဤဆောင်းပါးသည် ကိုးကားရန်အတွက် အသုံးများသော မောင်းနှင်မှုနည်းလမ်းများစွာ၏ အသုံးချပရိုဂရမ်များ၊ အားသာချက်များနှင့် အားနည်းချက်များကို ပိုင်းခြားစိတ်ဖြာထားသည်။

1. လျှပ်စစ်ဒလိမ့်တုံး
လျှပ်စစ်ဒရမ်များကို တပ်ဆင်ထားသော လျှပ်စစ်ဒရမ်များနှင့် ပြင်ပလျှပ်စစ်ဒရမ်များအဖြစ် ပိုင်းခြားထားသည်။ ၎င်းတို့ကြားရှိ အဓိကကွာခြားချက်မှာ တပ်ဆင်ထားသော လျှပ်စစ်ဒရမ်၏မော်တာအား ဒရမ်အတွင်းတွင် တပ်ဆင်ထားခြင်းဖြစ်ပြီး ပြင်ပလျှပ်စစ်ဒရမ်၏မော်တာအား ဒရမ်အပြင်ဘက်တွင် တပ်ဆင်ထားပြီး ဒရမ်နှင့် တင်းကျပ်စွာချိတ်ဆက်ထားသည်။
ဒရမ်အတွင်းတွင် မော်တာတပ်ဆင်ထားသောကြောင့် တပ်ဆင်ထားသော လျှပ်စစ်ဒရမ်သည် အပူပျံ့နှံ့မှု အားနည်းပါသည်။ ယေဘူယျအားဖြင့် ၎င်းအား 30kw အောက်နှင့် 150m ထက်နည်းသော ပါဝါရှိသော ခါးပတ် conveyor များတွင် အသုံးပြုသည်။ မော်တာအား ဒရမ်အပြင်ဘက်တွင် တပ်ဆင်ထားသောကြောင့် ပြင်ပလျှပ်စစ်ဒရမ်သည် ပိုမိုကောင်းမွန်သော အပူကို စုပ်ယူနိုင်စေသည်။ ယေဘုယျအားဖြင့် ၎င်းအား 45kw အောက်နှင့် 150m ထက်နည်းသော ပါဝါရှိသော ခါးပတ် conveyor များတွင် အသုံးပြုသည်။
အားသာချက်များ- ကျစ်လစ်သိပ်သည်းသောဖွဲ့စည်းပုံ၊ ပြုပြင်ထိန်းသိမ်းမှုကုန်ကျစရိတ်နည်းပါးခြင်း၊ မြင့်မားသောယုံကြည်စိတ်ချရမှု၊ မောင်းနှင်ကိရိယာနှင့် ဂီယာဒလိမ့်တုံးတို့ကို တစ်ခုတည်းအဖြစ် ပေါင်းစပ်ထားသည်။
အားနည်းချက်များ- မော်တာစတင်သည့်အခါ ပျော့ပျောင်းသောအစပြုမှု ညံ့ဖျင်းခြင်း၊ ပါဝါလိုင်းပေါ်တွင် ကြီးမားသောအကျိုးသက်ရောက်မှု။ ယုံကြည်စိတ်ချရမှုသည် Y-type motor + coupling + reducer drive method ထက် ပိုဆိုးသည်။
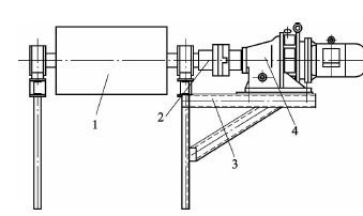
2. Y-type motor + coupling + reducer ၏ ညံ့ဖျင်းသော မောင်းနှင်မှုမုဒ်
အားသာချက်များ- ရိုးရှင်းသောဖွဲ့စည်းပုံ၊ သေးငယ်သောပြုပြင်ထိန်းသိမ်းမှုလုပ်ငန်းတာဝန်၊ ပြုပြင်ထိန်းသိမ်းမှုကုန်ကျစရိတ်နည်းပါးခြင်းနှင့်ယုံကြည်စိတ်ချရမှုမြင့်မားသည်။
အားနည်းချက်များ- မော်တာစတင်သည့်အခါ ပျော့ပျောင်းသောအစပြုမှု ညံ့ဖျင်းခြင်း၊ ပါဝါလိုင်းပေါ်တွင် ကြီးမားသောအကျိုးသက်ရောက်မှု။ ယေဘုယျအားဖြင့် 45kw အောက် ပါဝါနှင့် 150m ထက်နည်းသော ပါဝါရှိသော ခါးပတ် conveyor များတွင် အသုံးပြုသည်။
3. Y-type motor + torque limiting fluid coupling + reducer
၎င်းသည် 630kw အောက်နှင့် အရှည် 1500 မီတာအောက် ပါဝါတစ်ခုတည်းရှိသော belt conveyor များတွင် အသုံးများသော ယာဉ်မောင်းကိရိယာတစ်ခုဖြစ်သည်။
ထောင့်မှန်စတုဂံ-ကန့်သတ်အရည်အချင်းအချိတ်အဆက်ကို အနောက်အရန်အခန်းနှင့် နောက်ဘက်အရန်အခန်းမပါဘဲ စတုဂံ-ကန့်သတ်အရည်အချိတ်အဆက်အဖြစ် ပိုင်းခြားထားသည်။ မော်တာစတင်သောအခါတွင် အနောက်အရန်ခန်းမှတဆင့် လည်သာအပေါက်မှတဆင့် အရည်အဆက်အစပ်၏အလုပ်လုပ်သောအပေါက်ထဲသို့ ဖြည်းညှင်းစွာဝင်ရောက်လာသောကြောင့်၊ ၎င်း၏စတင်ခြင်းစွမ်းဆောင်ရည်သည် နောက်ပိုင်းထက်ပိုမိုကောင်းမွန်ပါသည်။
နောက်ဘက်အရန်အခန်းပါရှိသည့်တစ်ခုကို ရွေးချယ်ပါက၊ fluid coupling ၏မော်ဒယ်နှစ်ခုသည် ၎င်း၏ဂီယာပါဝါကို ဖြည့်ဆည်းပေးနိုင်သောအခါ၊ စတင်ချိန်ကြာမြင့်ပြီး fluid coupling ၏အပူထုတ်လွှတ်မှုကြီးမားသောကြောင့်၊ fluid coupling ၏ ပိုကြီးသော fluid coupling အမျိုးအစားကို ဦးစားပေးသင့်ပါသည်။
အနောက်အရန်အခန်းမပါသောတစ်ခုကို ရွေးချယ်ပါက fluid coupling ၏ မော်ဒယ်နှစ်ခုသည် ၎င်း၏ ဂီယာပါဝါကို ဖြည့်ဆည်းပေးနိုင်သောအခါ fluid coupling ၏စတင်ချိန်တိုတောင်းပြီး အပူထွက်မှုနည်းသောကြောင့် fluid coupling အမျိုးအစားကို ဦးစားပေးသင့်ပါသည်။
မော်တာများစွာဖြင့် မောင်းနှင်သော ခါးပတ်အသွားအလာများအတွက်၊ ဤဒရိုက်နည်းလမ်းကို ရွေးချယ်ပါက၊ နောက်ဘက်အရန်ခန်း torque limiting fluid coupling အမျိုးအစား fluid coupling ပါရှိသော fluid coupling ကို ရွေးချယ်ရန် အကြံပြုအပ်ပါသည်။
အားသာချက်များ- ကုန်ကျစရိတ်သက်သာခြင်း၊ ရိုးရှင်းပြီး ကျစ်လစ်သိပ်သည်းသော ဖွဲ့စည်းပုံ၊ ပြုပြင်ထိန်းသိမ်းမှု နည်းပါးခြင်း၊ ပြုပြင်ထိန်းသိမ်းမှုစရိတ်စက နည်းပါးခြင်း၊ မော်တာများစွာကို မောင်းနှင်သည့်အခါတွင်၊ မော်တာပါဝါကို ဟန်ချက်ညီစေခြင်း၊ နှောင့်နှေးခြင်းအား ဘူတာများအဖြစ် ခွဲခြားနိုင်ပြီး၊ ကြိုးစင်အား လျှော့လိုက်သည့်အခါ ဓာတ်အားလိုင်းအပေါ် သက်ရောက်မှု၊ ယုံကြည်စိတ်ချရမှု မြင့်မားသည်၊ စျေးနှုန်းလည်း နည်းပါးပြီး ၎င်းသည် ဦးစားပေးမောင်းနှင်သည့်မုဒ်ထက် 10 အရှည်ရှိသော သယ်ယူပို့ဆောင်ရေးစနစ်ဖြစ်သည်။
အားနည်းချက်များ- ပျော့ပျောင်းသောအစပြုမှုစွမ်းဆောင်ရည်သည် ညံ့ဖျင်းပြီး အောက်ဘက်သယ်ယူပို့ဆောင်ရေး ခါးပတ်အတင်အချအတွက် အသုံးပြုရန် ခါးပတ်အသွားအလာနှင့် အရှိန်ထိန်းညှိလုပ်ဆောင်မှု လိုအပ်သည့် ခါးပတ်အကူကို အသုံးပြုရန် မသင့်လျော်ပါ။
4. Y-type မော်တာ + အမြန်နှုန်းထိန်းညှိအရည်အချိတ်အဆက် + လျှော့ကိရိယာ
ယေဘုယျအားဖြင့် မီတာ 800 ထက်ပိုသော အရှည် 800 ကျော်ရှိသော တာဝေး ကြီးမားသော ခါးပတ်အသွားအလာများတွင် အသုံးများသော မောင်းသည့်နည်းလမ်းဖြစ်သည်။
အားသာချက်များ- ဖွဲ့စည်းပုံသည် ရိုးရှင်းသည်၊ ဝန်ပိုမှု ပြုပြင်ထိန်းသိမ်းမှု ပမာဏ သေးငယ်သည်၊ မော်တာသည် ဝန်မရှိပဲ စတင်သည်၊ မော်တာသည် ဝန်ပိုနေသည်၊ မော်တာများစွာကို မောင်းနှင်သောအခါ၊ စတင်ရန် နှောင့်နှေးနိုင်သည်၊ ၎င်းစတင်ချိန်တွင် power grid ပေါ်ရှိ ခါးပတ် conveyor ၏ သက်ရောက်မှုကို လျှော့ချနိုင်သည်၊ ယုံကြည်စိတ်ချရမှု ပိုမြင့်မားသည်၊ soft start performance သည် ပိုကောင်းသည်၊ ၎င်းတွင် start-up controllable performance ဖြစ်သည်၊ ဆိုလိုသည်မှာ start-up controllable startup အချိန်ဖြစ်သည်၊ ဆိုလိုသည်မှာ၊ ထိန်းချုပ်နိုင်ပြီး ဈေးနှုန်းလည်း သက်သာပါတယ်။
အားနည်းချက်များ- fluid coupling ကို စတင်သောအခါ၊ fluid coupling ၏ အလုပ်လုပ်သော အပေါက်၏ အမြန်နှုန်းပြောင်းလဲမှုမျဉ်းကွေးသည် linear မဟုတ်သည့်အပြင် နောက်ပြန်ကျသွားသောကြောင့်၊ controllable dynamic response သည် နှေးကွေးကာ close-loop control လုပ်ရန် ခက်ခဲပြီး တစ်ခါတစ်ရံတွင် ဆီယိုစိမ့်မှုလည်း ရှိနေပါသည်။ ၎င်းသည် အောက်သို့ သယ်ယူပို့ ဆောင်သည့် ခါးပတ် သယ်ယူခြင်းအတွက် မသင့်လျော်ပါ၊ နှင့် အမြန်နှုန်း ထိန်းညှိ လုပ်ဆောင်မှုပါရှိသော ခါးပတ် သယ်ယူသူ လိုအပ်ပါသည်။

5. Y-type motor + CST drive ကိရိယာ
Y-type motor + CST drive device ကို United States of Dodge Company မှ belt conveyor အတွက် ဒီဇိုင်းထုတ်ထားပြီး mechatronics drive device သည် ယေဘူယျအားဖြင့် မီတာ 1000 ထက်ပိုသော အရှည် 1000 မီတာကျော်ရှိသော တာဝေး အကြီးစား belt conveyor တွင် အသုံးပြုသည်။
အားသာချက်များ- ကောင်းမွန်သော soft start performance၊ စတင်သည့်အခါ linear နှင့် controllable speed curve၊ ကားရပ်နားသည့်အခါ speed curve controllable၊ closed-loop control လုပ်နိုင်သည်၊ motor no-load start၊ ရိုးရိုးဖွဲ့စည်းပုံ၊ အသေးစားပြုပြင်ထိန်းသိမ်းမှုလုပ်ငန်းဝန်၊ မော်တာများစွာကိုမောင်းနှင်သောအခါ၊ အဆင့်ဆင့်စတင်ရန်နှောင့်နှေးနိုင်ပြီး power grid ပေါ်ရှိ belt conveyor ၏အကျိုးသက်ရောက်မှုကို လျှော့ချနိုင်သည်။
အားနည်းချက်များ- ပြုပြင်ထိန်းသိမ်းရေးဝန်ထမ်းများနှင့် ချောဆီများအတွက် မြင့်မားသောလိုအပ်ချက်များ၊ စက်ပစ္စည်းများ ဈေးနှုန်းမြင့်မားခြင်း။ ၎င်းသည် အောက်သို့ သယ်ယူပို့ ဆောင်သည့် ခါးပတ် သယ်ယူခြင်းအတွက် မသင့်လျော်ပါ၊ နှင့် အမြန်နှုန်း ထိန်းညှိ လုပ်ဆောင်မှုပါရှိသော ခါးပတ် သယ်ယူသူ လိုအပ်ပါသည်။
6. Winding motor + reducer
အကွေ့အကောက်မော်တာ + အလျှော့ပေးသည့် ထိန်းချုပ်မှုပုံစံသုံးမျိုးရှိသည်။
ပထမအမျိုးအစား: ဒဏ်ရာမော်တာကြိုးတစ်ချောင်း ကြိမ်နှုန်း resistor သို့မဟုတ် ရေခံနိုင်ရည်၊
အမြန်နှုန်းထိန်းညှိခြင်းလုပ်ဆောင်ချက်မရှိသဖြင့် မော်တာအား မကြာခဏမစတင်နိုင်ပါ၊ ယေဘုယျအားဖြင့် မီတာ 500 ထက်ပိုသောအရှည်ရှိသော ခါးပတ် conveyor တွင်အသုံးပြုကြပြီး မော်တာမကြာခဏမစတင်နိုင်ပါ။
ဒုတိယအမျိုးအစား: ဝါယာကြိုး-အနာမော်တာ string metal resistor;
အမြန်နှုန်း ထိန်းညှိခြင်း လုပ်ဆောင်မှု မရှိသော်လည်း မော်တာအား မကြာခဏ စတင်နိုင်ပြီး thyristor ပါဝါဖြင့် ဘရိတ်အုပ်ပြီးနောက်၊ ၎င်းသည် အောက်ဘက် ခါးပတ် ပိုက်လိုင်းများ အတွက် သာမာန် မောင်းနှင်သည့် နည်းလမ်း ဖြစ်သည်။
တတိယအမျိုးအစား- အကွေ့အကောက်မော်တာ၏ cascade အမြန်နှုန်းထိန်းညှိမှု။
၎င်းသည် အမြန်နှုန်းထိန်းညှိခြင်းဆိုင်ရာ လုပ်ဆောင်ချက်ပါရှိပြီး အပိတ်ကွင်းထိန်းချုပ်မှုအတွက် အသုံးပြုနိုင်ပြီး ယေဘုယျအားဖြင့် မီတာ 1000 ကျော်အကွာအဝေးနှင့် အမြန်နှုန်းထိန်းညှိလုပ်ဆောင်ချက် ကြီးမားသော ခါးပတ်အသွားအလာများတွင် အသုံးပြုသည်။
အားသာချက်များ- ပထမနှင့်ဒုတိယထိန်းချုပ်မှုနည်းလမ်းများ၊ ရိုးရှင်းသောဖွဲ့စည်းပုံ၊ အသေးစားပြုပြင်ထိန်းသိမ်းမှုလုပ်ငန်းတာဝန်၊ ကောင်းမွန်သောပျော့ပျောင်းသောအစပြုမှုစွမ်းဆောင်ရည်၊ စျေးနှုန်းချိုသာမှု၊ စတင်သည့်အခါ မဟာဓာတ်အားလိုင်းပေါ်တွင် သေးငယ်သောအကျိုးသက်ရောက်မှု၊ မြင့်မားသောယုံကြည်စိတ်ချရမှု၊ ကောင်းမွန်သောထိန်းချုပ်နိုင်သောစွမ်းဆောင်ရည်၊ တတိယ ထိန်းချုပ်မှုမုဒ်တွင် ပါဝါဘရိတ်အုပ်ခြင်း စွမ်းဆောင်ရည် အထူးကောင်းမွန်ပါသည်။
အားနည်းချက်များ- ပထမနှင့် ဒုတိယ ထိန်းချုပ်မှုမုဒ်များသည် စတင်ခြင်းနှင့် ရပ်တန့်သောအခါတွင် ကြီးမားသော စွမ်းအင်သုံးစွဲမှုရှိသည်။ တတိယထိန်းချုပ်မှုမုဒ်စနစ်သည် ရှုပ်ထွေးပြီး သမရိုးကျအကြိမ်ရေ သို့မဟုတ် အလှည့်ကျအကြိမ်ရေဖြင့် အစားထိုးရန် သဘောထားရှိပါသည်။
7. မြန်နှုန်းမြင့် DC မော်တာ + လျှော့ကိရိယာ
အမြန်နှုန်းထိန်းညှိလုပ်ဆောင်မှု လိုအပ်သော ကြီးမားသော ခါးပတ်အသွားအလာများတွင် ယေဘုယျအားဖြင့် အသုံးပြုသည့် အမြန်နှုန်းထိန်းစနစ်ပါရှိသော မောင်းမုဒ်။
အားသာချက်များ- ကောင်းမွန်သော soft start performance၊ စတင်စဉ်အတွင်း linear controllable speed curve၊ parking when linear controllable speed curve, good electrical braking performance, stepless speed change, excellent controllable performance, closed-loop control, မြင့်မားသော ယုံကြည်စိတ်ချရမှု။
အားနည်းချက်များ - စျေးနှုန်းအလွန်စျေးကြီးသည်၊ thyristor rectifier စနစ်သည်ရှုပ်ထွေးသည်၊ အီလက်ထရွန်းနစ်ထိန်းချုပ်မှုကိရိယာများသည်ကြီးမားသောဧရိယာကိုဖုံးလွှမ်းသည်၊ ပါဝါအချက်နည်းပါးသည်၊ DC မော်တာတွင်ချော်ကွင်းများ၊ စုတ်တံကြီးသည်၊ ပြုပြင်ထိန်းသိမ်းမှုပမာဏကြီးမားသည်၊ ပေါက်ကွဲဒဏ်ခံနိုင်သောအမျိုးအစားမရှိပါ၊ လက်ရှိတွင်၎င်းကိုကျောက်မီးသွေးတွင်းများတွင်အသုံးမပြုနိုင်ပါ။

8. မြန်နှုန်းနိမ့် DC မော်တာသည် ခါးပတ် conveyor ၏ drive roller ကို တိုက်ရိုက် မောင်းနှင်သည်။
အရှိန်ထိန်းစနစ်ပါရှိသော မောင်းနှင်မှုမုဒ်ကို ယေဘူယျအားဖြင့် အရှိန်ထိန်းညှိလုပ်ဆောင်မှုတစ်ခုနှင့် မော်တာပါဝါ 1000kw ထက်ကြီးသော မော်တာတစ်လုံးတည်းပါဝါရှိသော ခါးပတ်အသွားအလာလိုအပ်သော ကြီးမားသော ပိုက်လိုင်းပေါ်တွင် အသုံးပြုသည်။
အားသာချက်များ- အလွန်ကောင်းမွန်သော soft start performance၊ စတင်သည့်အခါ linear controllable speed curve၊ parking when linear controllable speed curve, good electrical braking performance, stepless speed change, excellent controllable performance, closed-loop control, not reducer, မြင့်မားသော ယုံကြည်စိတ်ချရမှု။
အားနည်းချက်များ- စျေးနှုန်းအလွန်စျေးကြီးသည်၊ thyristor rectifier စနစ်သည်ရှုပ်ထွေးသည်၊ အီလက်ထရွန်းနစ်ထိန်းချုပ်မှုကိရိယာများသည်ကြီးမားသောဧရိယာကိုဖုံးလွှမ်းသည်၊ ပါဝါအချက်နည်းပါးသည်၊ DC မော်တာတွင်ချော်ကွင်းများ၊ စုတ်တံကြီးသည်၊ ပြုပြင်ထိန်းသိမ်းမှုပမာဏကြီးမားသည်၊ လက်ရှိပေါက်ကွဲခြင်းမရှိသောစွမ်းအားမြင့်ကျောက်မီးသွေးတွင်းတွင်အသုံးမပြုနိုင်ပါ။
9. ကြိမ်နှုန်းပြောင်းလဲခြင်းအမြန်နှုန်းထိန်းညှိမော်တာ + လျှော့ချကိရိယာ
ကြိမ်နှုန်းပြောင်းလဲခြင်း အမြန်နှုန်း မော်တာ + လျှော့ကိရိယာအတွက် ထိန်းချုပ်နည်းလမ်း နှစ်ခုရှိသည်။
ပထမအမျိုးအစား- ဖြတ်တောက်ခြင်းနှင့် ကြိမ်နှုန်းပြောင်းလဲခြင်း
အကြိမ်ရေပြောင်းလဲခြင်းစနစ်၏ ပါဝါအချက်မှာ နည်းပါးနေပြီး စတင်လုပ်ဆောင်ချိန်နှင့် လည်ပတ်နေစဉ်အတွင်း မြင့်မားသော ဟာမိုနီအမြောက်အများကို ထုတ်ပေးမည်ဖြစ်ပြီး၊ ၎င်းသည် ဓာတ်အားလိုင်းအား ညစ်ညမ်းစေမည်ဖြစ်သည်။ မော်တာ၏ မကြာခဏ စတင်ခြင်းသည် ကျယ်ကျယ်ပြန့်ပြန့် စီမံခန့်ခွဲရမည်ဖြစ်သည့် ဓာတ်အားလိုင်းအပေါ် ကြီးမားသော ဓာတ်ပြုပါဝါသက်ရောက်မှုကို ဖြစ်ပေါ်စေမည်ဖြစ်သည်။ ကြိမ်နှုန်းပြောင်းလဲခြင်းဆိုင်ရာ စက်ပစ္စည်းများတွင် ရင်းနှီးမြှုပ်နှံမှုမှာ အတော်လေးနည်းပါးပါသည်။
ဒုတိယအမျိုးအစား- အပြန်အလှန်လဲလှယ်မှုသည် ကြိမ်နှုန်းပြောင်းလဲခြင်းတစ်ခုဖြစ်သည်။
ကြိမ်နှုန်းပြောင်းလဲခြင်းစနစ်တွင် စစ်ထုတ်ယူနစ်နှင့် စက်အတွင်းရှိ လျော်ကြေးယူနစ်တစ်ခု တပ်ဆင်ထားသောကြောင့် ပါဝါအချက်မှာ 0.9 ထက် ကြီးသည်၊ ပိုမိုမြင့်မားသော ဟာမိုနစ်အစိတ်အပိုင်းသည် အလွန်သေးငယ်ပြီး ၎င်းသည် ဟာမိုနစ်ကို ညစ်ညမ်းစေမည်မဟုတ်သည့်အပြင် ဟာမိုနစ်စုပ်ယူမှုနှင့် ဓာတ်ပြုမှုလျော်ကြေးပေးကိရိယာကို တပ်ဆင်ရန် မလိုအပ်ဘဲ၊ တစ်ခုတည်းသောပါဝါသည် တရုတ်နိုင်ငံတွင် လက်ရှိအချိန်တွင် 2000kw ထက် ပိုမိုသော ပါဝါပြောင်းလဲခြင်းစနစ်တွင် ထုတ်လုပ်၍မရပါ။ စက်ပစ္စည်းများနှင့် အပိုပစ္စည်းများကို တင်သွင်းရမည်ဖြစ်ပြီး ပထမရင်းနှီးမြှုပ်နှံမှုတွင် အတော်လေးမြင့်မားသည်။ အမြန်နှုန်း ထိန်းညှိမှု လုပ်ဆောင်ချက်များ လိုအပ်သော ကြီးမားသော ခါးပတ်အသွားအလာများတွင် ယေဘုယျအားဖြင့် ၎င်းကို အသုံးပြုသည်။
အားသာချက်များ- အလွန်ကောင်းမွန်သော soft start performance၊ စတင်သည့်အခါ linear controllable speed curve၊ parking when linear controllable speed curve, good electrical braking performance, stepless speed change, excellent controllable performance, closed-loop control, မြင့်မားသော ယုံကြည်စိတ်ချရမှု။
အားနည်းချက်များ - စျေးနှုန်းအလွန်စျေးကြီးသည်၊ အီလက်ထရွန်းနစ်ထိန်းချုပ်မှုကိရိယာများသည်ကြီးမားသောဧရိယာကိုဖုံးလွှမ်းသည်၊ လက်ရှိတစ်ခုတည်းပါဝါသည် 400kw ပေါက်ကွဲမှုမဟုတ်သောအမျိုးအစားထက်ကြီးသည်၊ ကျောက်မီးသွေးတွင်းများတွင်အသုံးမပြုနိုင်ပါ။
belt conveyor ၏ drive device ကိုရွေးချယ်သောအခါ belt conveyor ၏အမျိုးမျိုးသောမောင်းနှင်မှုပုံစံများ၏အားသာချက်များနှင့်အားနည်းချက်များကိုအထက်ပါခွဲခြမ်းစိတ်ဖြာခြင်းအားဖြင့်၊
အရှိန်ထိန်းညှိရန်မလိုအပ်သော ခါးပတ်အလျားသည် 1500m ထက်နည်းသော ခါးပတ်အလျားတွင် Y-type motor + fluid coupling + reducer သည် ၎င်း၏ နှစ်သက်ရာ မောင်းနှင်မှုမုဒ်ဖြစ်ပြီး၊ နောက်တွင် အကွေ့အကောက်မော်တာ + လျှော့ကိရိယာ (ထိန်းချုပ်မှုမုဒ်မှာ အကွေ့အကောက်များသော မော်တာကြိုးတန်း သတ္တုခံနိုင်ရည်) ဖြစ်သည်။
ခါးပတ်အလျားသည် 1500 မီတာထက် ပိုရှည်ပါက Y-type motor + CST drive device သည် ဦးစားပေးမောင်းနှင်သည့်နည်းလမ်းဖြစ်ပြီး၊ နောက်တွင် Y-type motor + speed-regulating fluid coupling + reducer တို့ဖြစ်သည်။
ခါးပတ်အသွားအလာ ပမာဏ အလွန်ပြောင်းလဲပြီး အမြန်နှုန်း ထိန်းညှိမှု လိုအပ်ပါက၊ ကြိမ်နှုန်းပြောင်းလဲခြင်း အမြန်နှုန်း ထိန်းညှိမော်တာ + အလျှော့ပေးသူသည် ၎င်း၏ နှစ်သက်ရာ မောင်းနှင်မှုနည်းလမ်းဖြစ်ပြီး၊ နောက်တွင် အကွေ့အကောက် မော်တာ၏ cascade speed regulation + reducer ပါဝင်သည်။












